| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
ę╗ą®ÖCŲ„╚╦╩Ū╚½Ž“Ą─Ż¼▀@ęŌ╬Čų°╦³éā┐╔ęįį┌╚╬║╬Ģr║“čžų°ĄžŲĮ├µ(x,y) Ž“╚╬ęŌĘĮ Ž“▀\äėŻ¼Č°▓╗╣▄ÖCŲ„╚╦ć·└@╦³┤╣ų▒▌SĄ─ĘĮŽ“ĪŻ▀@ę╗īė┤╬Ą─ÖCäėąįąĶę¬─▄│»ę╗éĆęį╔Ž ĘĮŽ“▀\äėĄ─▌åūėĪŻ╦∙ęįŻ¼╚½Ž“ÖCŲ„╚╦Įø│Ż╩╣ė├ėąäė┴”Ą─╚Ąõ▌å╗“Ū“ą╬▌åĪŻ╠ņ═§ąŪ (Uranus) ╩ŪéĆ║▄║├Ą─└²ūėŻ¼╚ńłD2.30╦∙╩ŠĪŻ▀@éĆÖCŲ„╚╦╩╣ė├4éĆ╚Ąõ▌åŻ¼─▄d┴óĄž ą²▐D║═ŲĮęŲŪę▓╗╩▄Ž▐ųŲĪŻ
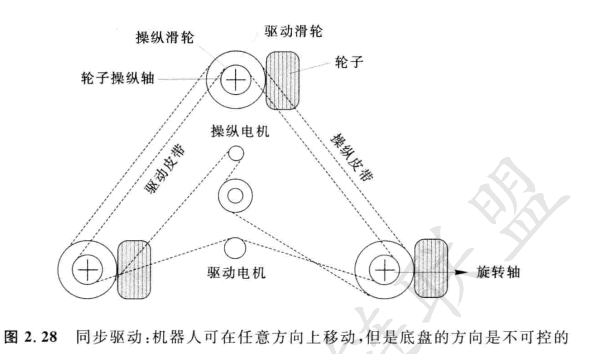
į┌╩ęā╚ęŲäėÖCŲ„╚╦æ¬ė├ųąŻ¼═¼▓Į“īäėĮYśŗ(łD2.28)╩Ūę╗ĘN┴„ąąĄ─▌åūėčb┼õŻ¼ę▓╩Ū ę╗éĆ┴Ņ╚╦║▄Ėą┼d╚żĄ─ĮYśŗĪŻę“×ķ╦³ļm╚╗ėą3éĆ“īäė║═▓┘┐v▌åŻ¼┐╔╩Ū┐é╣▓ų╗ė├┴╦2éĆļŖÖCĪŻę╗éĆŲĮęŲļŖÖCįOų├3éĆ▌åūėę╗ŲĄ─╦┘Č╚Ż╗ ę╗éĆ▓┘┐vļŖÖCŻ¼╩╣╦∙ėą▌åūė└@ų°╦³éā Ė„ūįĄ─┤╣ų▒▓┘┐v▌Sę╗Ųą²▐DĪŻĄ½ę¬ūóęŌĄ─╩ŪŻ¼▌åūė╩ŪŽÓī”ė┌ÖCŲ„╚╦Ą─Ąū▒P╩▄▓┘┐vĄ─Ż¼ ╦∙ęįŻ¼ø]ėąų▒ĮėĘĮĘ©ųžą┬įOČ©ÖCŲ„╚╦Ąū▒PĄ─ĘĮŽ“ĪŻīŹļH╔ŽŻ¼ė╔ė┌░╝═╣▓╗ŲĮ▌å╠źĄ─╗¼äėŻ¼į┌š¹éĆĢrķg└’Ąū▒PĘĮŽ“ę╗Č©Ģ■Ų»ęŲŻ¼įņ│╔ą²▐DĄ─║Į╬╗£yČ©š`▓ŅĪŻ
į┌ūĘŪ¾╚½Ž“ąįĄ─ŪķørŽ┬Ż¼═¼▓Į“īäė╠žäeėą║├╠ÄĪŻų╗ę¬Ė„┤╣ų▒Ą─▓┘┐v▌S┼cĖ„▌å╠ź Ą─Įėė|┬ĘÅĮ┼┼┴ąę╗ų┬Ż¼ÖCŲ„╚╦Š═┐╔ęįĮø│Żī”Ųõ▌åūėųžą┬Č©Ž“Ż¼▓óčžų°ą┬▄ē█E▀\äėČ°▓╗ Ė─ūā╦³Ą──_ėĪĪŻ«ö╚╗Ż¼╚ń╣¹ÖCŲ„╚╦Ą─Ąū▒PėąČ©Ž“╣”─▄Ż¼▓óŪęįOėŗš▀ėąęŌĄž┤“╦Ńųžą┬Č©Ž“Ąū▒PŻ¼─Ū├┤«ö╦³┼cę╗éĆčbį┌▌åūėĄū▒P╔ŽĄ─d┴óą²▐DĄ─▐D▒PĮY║ŽĢrŻ¼═¼▓Į“īäėät╩ŪW ę╗║Ž▀mĄ─ĪŻ╔╠śI╔ŽĄ─蹊┐ÖCŲ„╚╦Ż¼╚ńNomadics150 ╗“ RWI B21r,Č╝ęį▀@ĘNĮYśŗ│÷╩█ (łD1. 12)ĪŻ
Ė∙ō■║Į╬╗£yČ©Ż¼═¼▓Į“īäėŽĄĮyę╗░Ńā×ė┌šµš²Ą─╚½Ž“ĮYśŗŻ¼Ą½┴ėė┌▓Ņäė“īäė║═ Ackerman ▓┘┐vŽĄĮyĪŻī”┤╦ėąā╔éĆų„ꬥ─įŁę“Ż║Ž╚Ż¼ŲĮęŲļŖÖCę╗░Ńė├å╬Ė∙é„╦═Ħ“ī äė3éĆ▌åūėĪŻę“×ķ“īäėµ£ųąĄ──ÓØ{║═Ę┤ø_┤µį┌Ż¼╦∙ęį▓╗šō║╬ĢrŻ¼«ö“īäėļŖÖCģó┼cĢrŻ¼ ZĮ³Ą─▌åūėį┌Z▀hĄ─▌åūėų«Ū░ķ_╩╝ą²▐DŻ¼Å─Č°ę²ŲĄū▒PĘĮŽ“ąĪĄ─Ė─ūāĪŻ▀B═¼ļŖÖC╦┘ Č╚Ą─ĖĮ╝ėĖ─ūāŻ¼▀@ą®ąĪĮŪČ╚Ų½ęŲĢ■Ęe└█Ż¼į┌║Į╬╗£yČ©Ų┌ķg«a╔·┤¾Ą─ĘĮŽ“š`▓ŅĪŻŲõ┤╬Ż¼ ęŲäėÖCŲ„╚╦Ąū▒PĄ─ĘĮŽ“¤oų▒Įė┐žųŲĪŻĖ∙ō■Ąū▒PĄ─ĘĮŽ“Ż¼▌åūėĄ─═Ų┴”┐╔ęį╩ŪĖ▀Č╚▓╗ī” ĘQĄ─Ż¼2éĆ▌åūėį┌ę╗▀ģŻ¼Ą┌3éĆ▌åūėį┌å╬dę╗▀ģŻ╗╚ń╣¹ī”ĘQŻ¼ätę╗▀ģ1éĆ▌åūėŻ¼┴Ē═Ō1éĆ ▌åūėį┌Ū░Ņ^╗“║¾├µŻ¼╚ńłD2.22╦∙╩ŠĪŻ«ö▌å╠ź-Ąž├µ╗¼äėĢrŻ¼▓╗ī”ĘQĄ─ŪķørĢ■«a╔·Ė„ĘN ŅÉą═Ą─š`▓ŅŻ¼į┘┤╬į┌ÖCŲ„╚╦ĘĮŽ“Ą─║Į╬╗£yČ©ųąįņ│╔š`▓ŅĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |